Software - Transmitter
GPS_Receive_RF-pair-v4.ino#include <RFM69.h> // for some reason this needs to be first or will not compile!
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h>
#include <SPI.h>
#include <SPIFlash.h>
#define I2C_ADDR 0x27 // <<----- Add your address here. Find it from I2C Scanner
#define BACKLIGHT_PIN 3
#define En_pin 2
#define Rw_pin 1
#define Rs_pin 0
#define D4_pin 4
#define D5_pin 5
#define D6_pin 6
#define D7_pin 7
#define NODEID 99
#define NETWORKID 100
#define GATEWAYID 1
#define FREQUENCY RF69_915MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
#define LED 9
#define LED2 8
#define SERIAL_BAUD 9600
#define ACK_TIME 30 // # of ms to wait for an ack
#include <OneWire.h>
#include <DallasTemperature.h>
// Data wire is plugged into port 3 on the Arduino
#define ONE_WIRE_BUS 5
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
float ftemp = 0;
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
int TRANSMITPERIOD = 300; //transmit a packet to gateway so often (in ms)
byte sendSize = 0;
boolean requestACK = false;
//SPIFlash flash(8, 0xEF40); //was 30 EF40 for 16mbit windbond chip
RFM69 radio;
typedef struct {
int nodeId; //store this nodeId
unsigned long uptime; //uptime in ms
long temp; //float temp; //temperature maybe?
int AAltitude;
float LLat;
float LLon;
float TTemperature;
int SendCount;
}
Payload;
Payload theData;
int CCounter = 0;
int potPin = A3; // select the input pin for the potentiometer
int potValue = 0; // variable to store the value coming from the pot
byte buffer[10];
LiquidCrystal_I2C lcd(I2C_ADDR, En_pin, Rw_pin, Rs_pin, D4_pin, D5_pin, D6_pin, D7_pin);
/*
This sample code demonstrates the normal use of a TinyGPS++ (TinyGPSPlus) object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
*/
static const int RXPin = 3, TXPin = 4;
static const uint32_t GPSBaud = 4800;
// The TinyGPS++ object
TinyGPSPlus gps;
// The serial connection to the GPS device
SoftwareSerial ss(RXPin, TXPin);
void setup()
{
pinMode(LED2, OUTPUT);
digitalWrite(LED2, LOW);
lcd.begin (20, 4); // <<----- My LCD was 16x2
lcd.setBacklightPin(BACKLIGHT_PIN, POSITIVE); // Switch on the backlight
lcd.setBacklight(HIGH);
lcd.home (); // go home
lcd.print("GPS Test Display");
lcd.setCursor(0, 1);
lcd.print("d. bodnar 02-17-15");
lcd.setCursor(0, 2);
lcd.print("Units = MPH & Feet");
Serial.begin(115200);
ss.begin(GPSBaud);
radio.initialize(FREQUENCY, NODEID, NETWORKID);
radio.setHighPower(); //uncomment only for RFM69HW!
radio.encrypt(KEY);
char buff[50];
sprintf(buff, "\nTransmitting at %d Mhz...", FREQUENCY == RF69_433MHZ ? 433 : FREQUENCY == RF69_868MHZ ? 868 : 915);
Serial.println(buff);
sensors.begin();
// if (flash.initialize())
// Serial.println("SPI Flash Init OK!");
// else
// Serial.println("SPI Flash Init FAIL! (is chip present?)");
Serial.println(F("FullExample.ino"));
Serial.println(F("An extensive example of many interesting TinyGPS++ features"));
Serial.print(F("Testing TinyGPS++ library v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("by Mikal Hart"));
Serial.println();
Serial.println(F("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum"));
Serial.println(F(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail"));
Serial.println(F("---------------------------------------------------------------------------------------------------------------------------------------"));
}
long lastPeriod = -1;
void loop()
{
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
printInt(gps.satellites.value(), gps.satellites.isValid(), 5);
printInt(gps.hdop.value(), gps.hdop.isValid(), 5);
printFloat(gps.location.lat(), gps.location.isValid(), 11, 6);
printFloat(gps.location.lng(), gps.location.isValid(), 12, 6);
printInt(gps.location.age(), gps.location.isValid(), 5);
printDateTime(gps.date, gps.time);
printFloat(gps.altitude.meters(), gps.altitude.isValid(), 7, 2);
printFloat(gps.course.deg(), gps.course.isValid(), 7, 2);
printFloat(gps.speed.kmph(), gps.speed.isValid(), 6, 2);
printStr(gps.course.isValid() ? TinyGPSPlus::cardinal(gps.course.value()) : "*** ", 6);
unsigned long distanceKmToLondon =
(unsigned long)TinyGPSPlus::distanceBetween(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON) / 1000;
printInt(distanceKmToLondon, gps.location.isValid(), 9);
double courseToLondon =
TinyGPSPlus::courseTo(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON);
printFloat(courseToLondon, gps.location.isValid(), 7, 2);
const char *cardinalToLondon = TinyGPSPlus::cardinal(courseToLondon);
printStr(gps.location.isValid() ? cardinalToLondon : "*** ", 6);
printInt(gps.charsProcessed(), true, 6);
printInt(gps.sentencesWithFix(), true, 10);
printInt(gps.failedChecksum(), true, 9);
// Serial.println();
Serial.print(" 6 dig test "); Serial.println(gps.location.lat(), 6);
smartDelay(1000);
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("No GPS data received: check wiring"));
lcd.clear();
float Satellites = gps.satellites.value();
lcd.setCursor(0, 0); lcd.print("Sat.= "); lcd.print(Satellites, 0);
lcd.setCursor(9, 0);
float hdop = gps.hdop.value(); lcd.print("hdop= "); lcd.print(hdop, 0);
lcd.setCursor(0, 1);
float SpeedM = gps.speed.mps();
lcd.print("Speed= "); lcd.print(SpeedM, 1);
lcd.setCursor(0, 2);
float altitude = gps.altitude.feet();
lcd.print("alt.= "); lcd.print(altitude, 0);
lcd.setCursor(0, 3);
float latitude = gps.location.lat();
lcd.print(latitude, 6);
lcd.setCursor(10, 3);
float longitude = gps.location.lng();
lcd.print(longitude, 6);
if (Satellites >= 3)
digitalWrite(LED2, HIGH);
else
digitalWrite(LED2, LOW);
if (Serial.available() > 0)
{
char input = Serial.read();
if (input >= 48 && input <= 57) //[0,9]
{
TRANSMITPERIOD = 100 * (input - 48);
if (TRANSMITPERIOD == 0) TRANSMITPERIOD = 1000;
Serial.print("\nChanging delay to ");
Serial.print(TRANSMITPERIOD);
Serial.println("ms\n");
}
if (input == 'r') //d=dump register values
radio.readAllRegs();
//if (input == 'E') //E=enable encryption
// radio.encrypt(KEY);
//if (input == 'e') //e=disable encryption
// radio.encrypt(null);
/* if (input == 'd') //d=dump flash area
{
Serial.println("Flash content:");
int counter = 0;
while (counter <= 256) {
Serial.print(flash.readByte(counter++), HEX);
Serial.print('.');
}
while (flash.busy());
Serial.println();
}
if (input == 'e')
{
Serial.print("Erasing Flash chip ... ");
flash.chipErase();
while (flash.busy());
Serial.println("DONE");
}
if (input == 'i')
{
Serial.print("DeviceID: ");
word jedecid = flash.readDeviceId();
Serial.println(jedecid, HEX);
}
*/
}
//check for any received packets
if (radio.receiveDone())
{
Serial.print('[');
Serial.print(radio.SENDERID, DEC);
Serial.print("] ");
//for (byte i = 0; i < radio.DATALEN; i++) //These lines were removed to prevent a compile error
// Serial.print((char)radio.DATA[i]); // due to LCD library incompatibility with the RF library
Serial.print(" [RX_RSSI:");
Serial.print(radio.readRSSI());
Serial.print("]");
if (radio.ACKRequested())
{
radio.sendACK();
Serial.print(" - ACK sent");
delay(10);
}
Blink(LED, 5);
Serial.println();
}
// Serial.print("Requesting temperatures...");
sensors.requestTemperatures(); // Send the command to get temperatures
// Serial.println("DONE");
Serial.print("Temperature for the device 1 (index 0) is: ");
Serial.print(sensors.getTempCByIndex(0));
ftemp = sensors.getTempCByIndex(0);
ftemp = ftemp * 9;
ftemp = ftemp / 5;
ftemp = ftemp + 32;
Serial.print(" F= ");
Serial.println(ftemp);
int currPeriod = millis() / TRANSMITPERIOD;
if (currPeriod != lastPeriod)
{
//fill in the struct with new values
theData.nodeId = Satellites;
theData.uptime = Satellites; // working
theData.temp = hdop ; //hdop works
theData.AAltitude = altitude;
theData.LLat = latitude;
theData.LLon = longitude;
theData.TTemperature = ftemp;
CCounter = ++CCounter ;
theData.SendCount = CCounter;
// float LLat;
// float LLon;
// Serial.print("Sending struct (");
// Serial.print(sizeof(theData));
// Serial.print(" bytes) ... ");
if (radio.sendWithRetry(GATEWAYID, (const void*)(&theData), sizeof(theData)))
// Serial.print(" ok!");
// else Serial.print(" nothing...");
// Serial.println();
Blink(LED, 3);
lastPeriod = currPeriod;
}
}
// This custom version of delay() ensures that the gps object
// is being "fed".
static void smartDelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void printFloat(float val, bool valid, int len, int prec)
{
if (!valid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i = flen; i < len; ++i)
Serial.print(' ');
}
smartDelay(0);
}
static void printInt(unsigned long val, bool valid, int len)
{
char sz[32] = "*****************";
if (valid)
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i = strlen(sz); i < len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len - 1] = ' ';
Serial.print(sz);
smartDelay(0);
}
static void printDateTime(TinyGPSDate &d, TinyGPSTime &t)
{
if (!d.isValid())
{
Serial.print(F("********** "));
}
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d ", d.month(), d.day(), d.year());
Serial.print(sz);
}
if (!t.isValid())
{
Serial.print(F("******** "));
}
else
{
char sz[32];
sprintf(sz, "%02d:%02d:%02d ", t.hour(), t.minute(), t.second());
Serial.print(sz);
}
printInt(d.age(), d.isValid(), 5);
smartDelay(0);
}
static void printStr(const char *str, int len)
{
int slen = strlen(str);
for (int i = 0; i < len; ++i)
Serial.print(i < slen ? str[i] : ' ');
smartDelay(0);
}
void Blink(byte PIN, int DELAY_MS)
{
pinMode(PIN, OUTPUT);
digitalWrite(PIN, HIGH);
delay(DELAY_MS);
digitalWrite(PIN, LOW);
}
|
Software - Receiver
GPS_Receive_RF-pair-LCD-v5.ino/*
Note that the LCD library for I2C is not the original one but from http://www.divshare.com/download/launch/24151116-7dc
the original had a conflict with the RF library
*/
#include <RFM69.h>
#include <LiquidCrystal_I2C.h>;
//#include <LCD.h>//
#include <SPI.h>
#include <SPIFlash.h>
#include <Wire.h>
#define I2C_ADDR 0x27 // <<----- Add your address here. Find it from I2C Scanner
#define BACKLIGHT_PIN 3
#define En_pin 2
#define Rw_pin 1
#define Rs_pin 0
#define D4_pin 4
#define D5_pin 5
#define D6_pin 6
#define D7_pin 7
#define NODEID 1
#define NETWORKID 100
#define FREQUENCY RF69_915MHZ //Match this with the version of your Moteino! (others: RF69_433MHZ, RF69_868MHZ)
#define KEY "thisIsEncryptKey" //has to be same 16 characters/bytes on all nodes, not more not less!
#define LED 9
#define LED2 8
#define SERIAL_BAUD 9600
#define ACK_TIME 30 // # of ms to wait for an ack
RFM69 radio;
//SPIFlash flash(8, 0xEF40); //was 30 EF40 for 16mbit windbond chip
bool promiscuousMode = false; //set to 'true' to sniff all packets on the same network
typedef struct {
int nodeId; //store this nodeId
unsigned long uptime; //uptime in ms
long temp; //float temp; //temperature maybe?
int AAltitude;
float LLat;
float LLon;
float TTemperature;
int SendCount;
}
Payload;
Payload theData;
long AvgAltitude = 0;
int Readings = 0;
int MINhdop = 999;
LiquidCrystal_I2C lcd(0x27, 20, 4); // set the LCD address to 0x27 for a 16 chars and 2 line display
void setup() {
pinMode(LED2, OUTPUT);
digitalWrite(LED2, LOW);
lcd.init(); // initialize the lcd
// Print a message to the LCD.
lcd.backlight();
lcd.home (); // go home
lcd.print("GPS Test Display");
lcd.setCursor(0, 1);
lcd.print("d. bodnar 02-17-15");
lcd.setCursor(0, 2);
lcd.print("Units = MPH & Feet");;
Serial.begin(SERIAL_BAUD);
delay(10);
radio.initialize(FREQUENCY, NODEID, NETWORKID);
radio.setHighPower(); //uncomment only for RFM69HW!
radio.encrypt(KEY);
radio.promiscuous(promiscuousMode);
char buff[50];
sprintf(buff, "\nListening at %d Mhz...", FREQUENCY == RF69_433MHZ ? 433 : FREQUENCY == RF69_868MHZ ? 868 : 915);
Serial.println(buff);
// if (flash.initialize())
// Serial.println("SPI Flash Init OK!");
// else
// Serial.println("SPI Flash Init FAIL! (is chip present?)");
}
byte ackCount = 0;
void loop() {
//process any serial input
if (Serial.available() > 0)
{
char input = Serial.read();
if (input == 'r') //d=dump all register values
radio.readAllRegs();
if (input == 'E') //E=enable encryption
radio.encrypt(KEY);
if (input == 'e') //e=disable encryption
radio.encrypt(null);
if (input == 'p')
{
promiscuousMode = !promiscuousMode;
radio.promiscuous(promiscuousMode);
Serial.print("Promiscuous mode ");
Serial.println(promiscuousMode ? "on" : "off");
}
/* if (input == 'd') //d=dump flash area
{
Serial.println("Flash content:");
int counter = 0;
while (counter <= 256) {
Serial.print(flash.readByte(counter++), HEX);
Serial.print('.');
}
while (flash.busy());
Serial.println();
}
if (input == 'D')
{
Serial.print("Deleting Flash chip content... ");
flash.chipErase();
while (flash.busy());
Serial.println("DONE");
}
if (input == 'i')
{
Serial.print("DeviceID: ");
word jedecid = flash.readDeviceId();
Serial.println(jedecid, HEX);
}
*/
}
if (radio.receiveDone())
{
// Serial.print('[');
// Serial.print(radio.SENDERID, DEC);
// Serial.print("] ");
// Serial.print(" [RX_RSSI:");
// Serial.print(radio.readRSSI());
// Serial.print("]");
if (promiscuousMode)
{
Serial.print("to [");
Serial.print(radio.TARGETID, DEC);
Serial.print("] ");
}
if (radio.DATALEN != sizeof(Payload))
Serial.print("Invalid payload received, not matching Payload struct!");
else
{
theData = *(Payload*)radio.DATA; //assume radio.DATA actually contains our struct and not something else
// Serial.print(" nodeId=");
// Serial.print(theData.nodeId);
int Sats = theData.uptime;
Serial.print(" Satellites=");
Serial.print(theData.uptime);
Serial.print(" hdop=");
Serial.print(theData.temp);
if (theData.temp <= MINhdop & theData.temp != 0)
MINhdop = theData.temp;
Serial.print(" MINhdop=");
Serial.print(MINhdop);
Serial.print(" Altitude=");
Serial.print(theData.AAltitude);
AvgAltitude = AvgAltitude + theData.AAltitude;
Readings = ++Readings;
int AvgAlt = AvgAltitude / Readings;
Serial.print(" Av-alt ");
Serial.print(AvgAlt);
Serial.print(" Lat=");
Serial.print(theData.LLat, 6);
Serial.print(" Lon=");
Serial.print(theData.LLon, 6);
Serial.print(" Ftemp=");
Serial.print(theData.TTemperature, 1);
Serial.print(" Count=");
Serial.print(theData.SendCount);
if (Sats >= 3)
digitalWrite(LED2, HIGH);
else
digitalWrite(LED2, LOW);
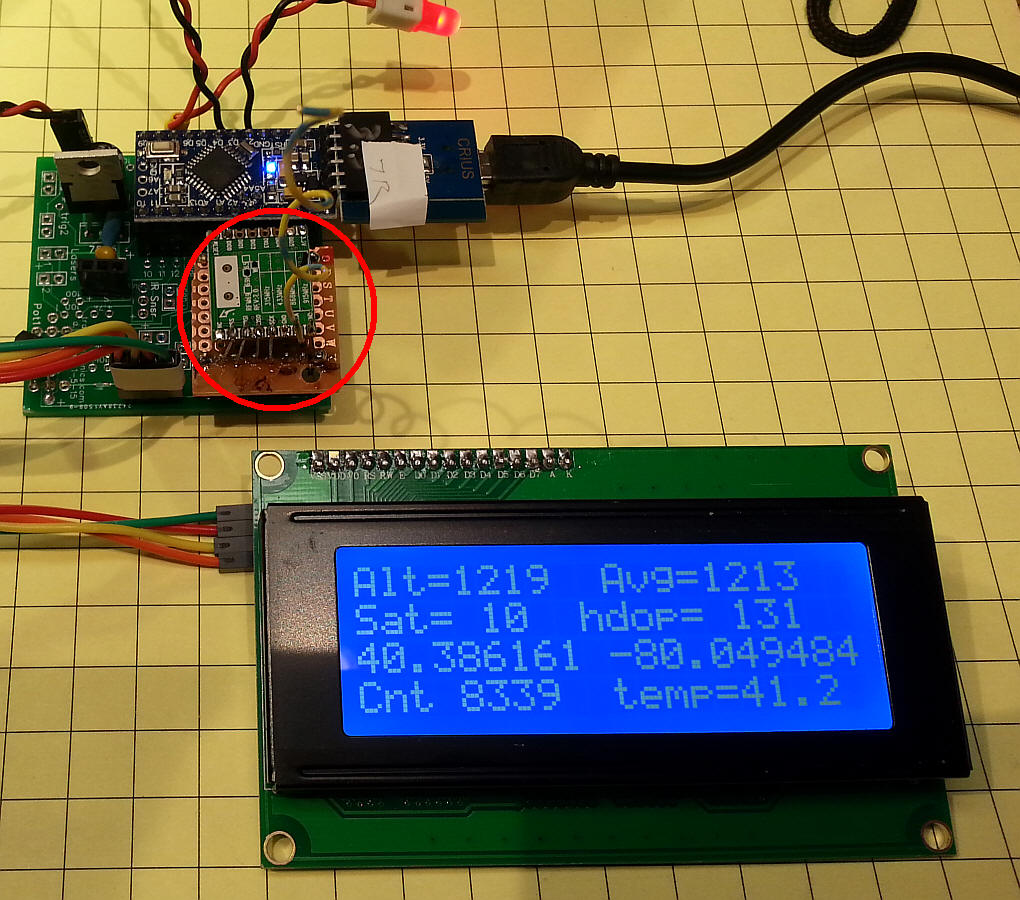
lcd.clear();
lcd.print("Alt="); lcd.print(theData.AAltitude); lcd.print(" Avg="); lcd.print(AvgAlt);
lcd.setCursor(0, 1);
lcd.print("Sat= "); lcd.print(theData.uptime); lcd.print(" hdop= "); lcd.print(theData.temp);
lcd.setCursor(0, 2);
lcd.print(theData.LLat, 6); lcd.print(" "); lcd.print(theData.LLon, 6);
lcd.setCursor(0, 3);
lcd.print("Cnt "); lcd.print(theData.SendCount); lcd.print(" temp="); lcd.print(theData.TTemperature, 1);
}
if (radio.ACKRequested())
{
byte theNodeID = radio.SENDERID;
radio.sendACK();
// Serial.print(" - ACK sent.");
// When a node requests an ACK, respond to the ACK
// and also send a packet requesting an ACK (every 3rd one only)
// This way both TX/RX NODE functions are tested on 1 end at the GATEWAY
/* if (ackCount++%3==0)
{
Serial.print(" Pinging node ");
Serial.print(theNodeID);
Serial.print(" - ACK...");
delay(3); //need this when sending right after reception .. ?
if (radio.sendWithRetry(theNodeID, "ACK TEST", 8, 0, 50)) // 0 = only 1 attempt, no retries; wait up to 50mS
Serial.print("ok!");
else Serial.print("nothing");
}
*/
}
Serial.println();
Blink(LED, 300);
}
}
void Blink(byte PIN, int DELAY_MS)
{
pinMode(PIN, OUTPUT);
digitalWrite(PIN, HIGH);
delay(DELAY_MS);
digitalWrite(PIN, LOW);
}
|